Table of Contents >> Show >> Hide
- Introduction: The Robot Dog Revolution Is Getting Weirdly Wonderful
- What Makes a Quadruped “Dynamic”?
- The mjbots Quad: A Small Open Source Robot With Serious Ambition
- Stanford Doggo: The Open Source Robot That Jumped Into the Spotlight
- MIT Mini Cheetah: The Benchmark Everyone Keeps Looking At
- Solo 8 and the Open Dynamic Robot Initiative
- The Software Side: Brains, Gaits, and Simulators
- How Open Source Quadrupeds Compare With Commercial Robot Dogs
- What Builders Need to Understand Before Starting
- Why This Technology Matters Beyond Cool Videos
- Specific Examples of Open Source Quadruped Innovation
- Challenges Holding Open Source Quadrupeds Back
- Experiences and Practical Lessons From Working Around Dynamic Open Source Quadrupeds
- Conclusion: Open Source Robot Dogs Are More Than a Cool Trick
- SEO Tags
Note: This article is original editorial content based on real open-source robotics projects, research platforms, and public technical information. It contains no raw source links and is prepared for web publishing.
Introduction: The Robot Dog Revolution Is Getting Weirdly Wonderful
Not long ago, a four-legged robot that could trot, jump, recover from a fall, or bounce around like an over-caffeinated terrier felt like something reserved for elite university labs, defense contractors, and companies with budgets large enough to make a spreadsheet cry. Today, the story is changing. The rise of the open source quadruped has pulled dynamic legged robotics out of the glass case and placed it on workbenches, in classrooms, and inside GitHub repositories where builders can poke, improve, and occasionally break things in the noble name of science.
The phrase “Amazing Open Source Quadruped Capable Of Dynamic Motion” points to a fascinating corner of robotics: small, affordable, four-legged machines designed not merely to shuffle across flat floors, but to perform real dynamic motion. That means running, hopping, jumping, balancing, adapting to terrain, absorbing impacts, and responding quickly enough that the robot looks less like a toy with legs and more like a tiny mechanical animal with a suspiciously advanced nervous system.
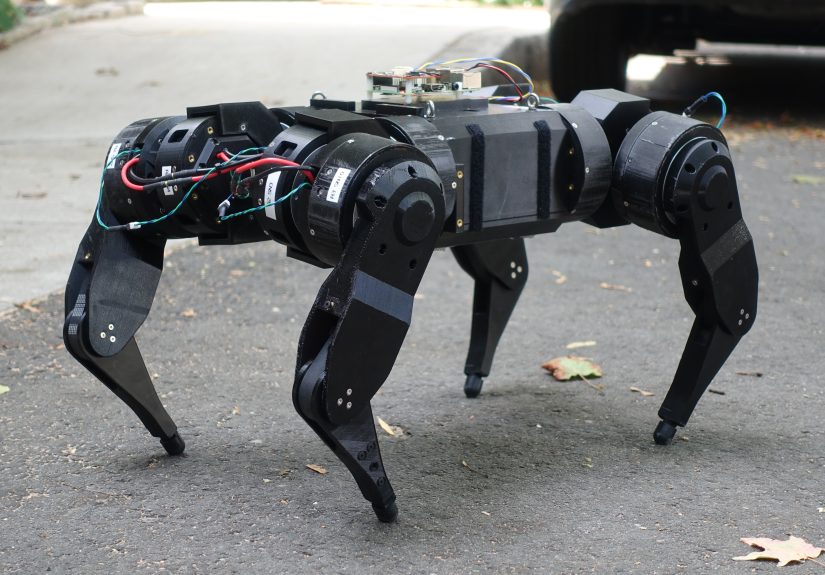
Projects such as the mjbots Quad A0 and Quad A1, Stanford Doggo, Solo 8 from the Open Dynamic Robot Initiative, and research inspirations like MIT Mini Cheetah show how far the field has moved. These machines prove that dynamic quadruped robot design is no longer limited to locked-down commercial platforms. With brushless motors, torque control, 3D-printed parts, open hardware files, simulation tools, and patient builders who apparently enjoy debugging at 2 a.m., capable robot dogs are becoming more accessible than ever.
What Makes a Quadruped “Dynamic”?
A basic walking robot can place one foot in front of another. That is impressive, especially if you have ever watched a hobby servo robot collapse like a folding lawn chair. But dynamic motion is a different beast. A dynamic quadruped robot uses momentum, torque, fast feedback, balance control, and carefully timed ground contact to move with agility. It does not simply pose its legs; it reacts.
Static Walking vs. Dynamic Locomotion
Static walking keeps the robot balanced at nearly every moment. It is cautious, stable, and relatively slow. Imagine a person stepping across a frozen pond while holding a tray of soup. Dynamic locomotion, on the other hand, accepts that motion itself can help create stability. Trotting, bounding, hopping, and jumping all involve moments where the robot must trust its control system, actuator response, and mechanical design.
This is where open source quadrupeds become exciting. Instead of merely copying the look of commercial robot dogs, builders are experimenting with the difficult ingredients: torque-controlled joints, low-latency communication, compliant control, model predictive control, onboard computation, and simulation-to-real testing. These are not cosmetic features. They are the difference between a robot that walks across your living room and one that can survive a bad landing without instantly becoming a modern art installation.
The mjbots Quad: A Small Open Source Robot With Serious Ambition
One of the most interesting examples in this space is the mjbots quad, developed by Josh Pieper. The project gained attention because it aimed for a small, dynamic quadruped similar in spirit to MIT’s Mini Cheetah, but with a key twist: it was designed as an open source platform. The mjbots quad project includes source and design files for the robot series, its controlling interfaces, development utilities, simulation components, hardware, and documentation.
The early Quad A0 project is especially important because it shows the gritty engineering behind dynamic motion. Off-the-shelf components were not enough for the goals of the robot, so the project led to the development of custom motor control hardware. The result was moteus, a compact brushless motor controller designed to turn hobby brushless motors into high-performance servo actuators.
Why the Moteus Controller Matters
In legged robotics, the motor controller is not a boring background part. It is the robot’s reflex pathway. A quadruped that wants to jump or run must control force quickly and accurately. The moteus controller integrates drive electronics, a 32-bit microcontroller, an absolute magnetic encoder, and high-speed communication in a compact package. Later product specifications list features such as field-oriented control, high peak phase current, fast control rates, and support for multi-servo systems.
That matters because each leg on a dynamic quadruped must do more than “move to position X.” It must push, soften, stiffen, absorb, and correct. When the robot’s foot hits the ground, the joint controllers must know what is happening and respond before the body has time to fall. In practical terms, better motor control gives the robot a fighting chance against gravity, which remains undefeated in most robotics labs.
Open Source Does Not Mean Easy
The charm of the mjbots quad is not that it makes dynamic robotics effortless. It does not. Instead, it makes the process visible. The project documents the hard parts: gait control, feedback limitations, hardware revisions, thermal testing, actuator design, communication, simulation, and failure handling. That openness is valuable because robotics progress often happens when someone else can learn from yesterday’s smoke, stripped screws, and mystery oscillations.
Stanford Doggo: The Open Source Robot That Jumped Into the Spotlight
Another star of the open source quadruped world is Stanford Doggo, a student-built robot designed to be relatively affordable, reproducible, and capable of dynamic locomotion. It could walk, trot, hop, jump, dance, and even perform backflips on padding. More importantly, the team released plans, code, and a supply list so others could build their own version.
Stanford Doggo demonstrated that a small research team could achieve impressive performance without a million-dollar robotics budget. Its design used quasi-direct-drive actuation, which reduces the heavy gearing often found in older robots. Lower gear ratios can help improve backdrivability and force control, making the robot more responsive to ground contact.
Why Quasi-Direct Drive Is a Big Deal
Traditional highly geared servos can be strong, but they often feel stiff and disconnected from the world. Dynamic robots need to interact with the ground like athletes, not like furniture. Quasi-direct-drive quadruped designs use motors and transmissions that allow high torque while preserving responsiveness. This helps the control system estimate and command forces more effectively.
In plain English: the robot can feel and push better. That is why Doggo could jump impressively high for its size and why it became a useful reference point for builders interested in robot dog open source platforms. It was not just cute. It was a serious lesson in how accessible hardware, clever mechanical design, and open documentation can move a field forward.
MIT Mini Cheetah: The Benchmark Everyone Keeps Looking At
MIT Mini Cheetah is not usually described as a fully open source consumer build in the same way as some community projects, but it is impossible to talk about dynamic quadrupeds without mentioning it. The robot became famous as the first four-legged robot to perform a backflip. At around 20 pounds, it showed how lightweight design, modular electric actuators, and robust control could produce movements that looked almost unfairly agile.
For open source builders, Mini Cheetah acts like a north star. It shows what is possible when actuator design, mechanical packaging, and control software all work together. Its modular motors and experimental friendliness inspired many smaller projects, including the way hobbyists and researchers think about building repairable, testable, shareable quadrupeds.
The Lesson From Mini Cheetah
The biggest lesson is not “make the robot do a flip,” although, yes, that gets the internet’s attention faster than a cat wearing sunglasses. The real lesson is that dynamic movement requires designing the whole system around agility. Motors, frames, batteries, controllers, sensors, and algorithms must be considered together. If one part is slow, weak, heavy, or fragile, the robot will find out immediatelyusually by face-planting.
Solo 8 and the Open Dynamic Robot Initiative
The Open Dynamic Robot Initiative is another major force in accessible legged robotics. It focuses on low-cost, low-complexity actuator modules using brushless motors, mostly 3D-printed parts, and off-the-shelf components. Its quadruped platforms, including Solo 8 and later Solo designs, are aimed at making advanced legged locomotion research reproducible across labs.
Solo 8 is a dog-sized, torque-controlled open source quadruped designed so researchers, startups, and teaching institutions can experiment with sophisticated motion at lower cost. It can perform jumping actions, walk in multiple configurations and directions, and recover its posture after being overturned. Its hardware and software are openly available under a permissive license, helping researchers compare results and build on shared work.
Why Reproducibility Matters
Robotics research can be painfully hard to reproduce. A paper may describe a controller that works beautifully, but if the hardware is custom, expensive, or unavailable, other teams cannot easily test it. Open platforms such as Solo 8 help solve that problem. When multiple labs use similar hardware, they can compare controllers, reinforcement learning strategies, terrain tests, and failure cases more fairly.
This is especially important for legged robot research, where small differences in friction, actuator response, battery voltage, or foot design can completely change the result. Shared open-source hardware does not eliminate those variables, but it gives everyone a common starting line.
The Software Side: Brains, Gaits, and Simulators
A quadruped’s body gets the attention, but the software is where the magic either happens or quietly falls into a stack trace. Modern open source robotics projects often rely on simulation tools, robot operating frameworks, custom control loops, and visualization utilities before they ever risk a real machine.
ROS and Gazebo in Quadruped Development
ROS and Gazebo-based environments are commonly used for robot description, joint control experiments, and low-level testing. For example, Unitree’s public ROS simulation packages allow users to load robot models and joint controllers in Gazebo, where they can test position, velocity, and torque control. Simulation does not perfectly replace hardware, but it is a very good place to crash a robot for free.
That last point is not a joke. Training or testing dynamic locomotion directly on hardware can be expensive and dangerous. A bad controller may slam a leg into the ground, overheat a motor, or launch the robot in a direction nobody voted for. Simulation lets developers tune ideas, inspect behavior, and identify obvious mistakes before touching the real platform.
From Gait Sequencing to Model Predictive Control
Early quadruped robots often used simple gait sequencing: move this foot, shift weight, move another foot. Dynamic robots need more. They may use feedback control, impedance control, model predictive control, whole-body control, or reinforcement learning policies. The goal is to coordinate body motion and foot forces so the robot can react to uneven terrain, pushes, slips, and changing speed.
In simpler terms, the robot needs to know not only where its feet should go, but why. Is the foot pushing? Landing? Swinging? Recovering? Avoiding an obstacle? Dynamic motion is not a dance routine played blindly. It is continuous negotiation between the robot and the ground.
How Open Source Quadrupeds Compare With Commercial Robot Dogs
Commercial quadrupeds such as Boston Dynamics Spot show what mature legged robots can do in industrial inspection, sensing, mapping, and remote operation. Spot is built as a professional product with payload mounting, rugged design, autonomy features, APIs, and support. It is meant to work in mines, factories, construction sites, power plants, and other places where humans would rather not crawl around with a clipboard.
Open source quadrupeds usually serve a different purpose. They are learning machines, research platforms, and experimentation tools. They may not match commercial robots in reliability, safety certification, payload capacity, or polished autonomy. But they excel in transparency and hackability. You can inspect the files, modify a bracket, change a control loop, print a new part, or replace a motor controller. Commercial robots are products. Open source robots are conversations.
The Real Value Is Access
The most important contribution of open source quadruped robots is access. Students can learn legged locomotion on real hardware. Small labs can test control algorithms. Independent builders can understand the entire machine rather than treating it like a sealed black box. Startups can prototype ideas without starting from zero. Even failures become educational because the design is visible.
What Builders Need to Understand Before Starting
Building an open source quadruped robot is rewarding, but it is not the same as assembling a bookshelf. It combines mechanical design, electrical safety, embedded systems, software engineering, control theory, battery management, and a certain emotional readiness to hear a motor make a noise it absolutely should not make.
1. Actuators Are Everything
For dynamic motion, actuators matter more than almost anything else. Weak servos may walk slowly, but they usually cannot jump, absorb impact, or react quickly enough for robust locomotion. Brushless motors with high-performance controllers, torque sensing or estimation, and low-latency communication are the foundation of modern agile quadrupeds.
2. Weight Is the Silent Enemy
Every gram affects acceleration, battery life, impact forces, and control response. A heavier frame needs stronger actuators, which need more power, which needs a larger battery, which makes the frame heavier. This is the robotics version of eating one cookie and somehow waking up inside a bakery.
3. Feet Matter More Than They Look
Foot design controls contact with the ground. Rubber pads, compliance, contact sensors, and shape all influence how the robot handles impact and slip. A robot with brilliant software but terrible feet is like a marathon runner wearing buttered socks.
4. Simulation Helps, But Reality Has Opinions
Simulation is essential, but real floors have friction, flex, dust, unevenness, and surprises. A gait that works perfectly in simulation may fail when a cable shifts, a screw loosens, or the battery voltage sags. Good development includes both simulation and careful physical testing.
5. Safety Is Not Optional
A dynamic quadruped can move fast, kick hard, and fall unpredictably. Builders should test on padding, use emergency stops, keep fingers away from joints, monitor temperatures, and respect battery safety. A small robot dog is still a robot. It does not care that your hand was “only there for a second.”
Why This Technology Matters Beyond Cool Videos
It is easy to reduce quadruped robots to viral clips: backflips, dancing robot dogs, dramatic recovery moves, or tiny mechanical trots across a lab floor. Those clips are fun, but the deeper significance is bigger. Legged robots can go where wheels struggle. They can step over obstacles, climb irregular terrain, recover balance, and carry sensors through environments designed for humans and animals rather than machines.
Potential applications include search and rescue, industrial inspection, environmental monitoring, agricultural scouting, hazardous-site exploration, construction documentation, and education. Open source platforms accelerate these possibilities because they let more people experiment. Innovation rarely comes from one locked room. It comes from many messy benches, many failed prototypes, and many builders saying, “Wait, what if we try this?”
Dynamic quadrupeds also push forward related fields such as reinforcement learning, real-time control, compliant actuation, embedded computing, sensor fusion, and human-robot interaction. A better robot dog is not just a better robot dog. It is a testbed for the future of physical AI.
Specific Examples of Open Source Quadruped Innovation
mjbots Quad A0 and A1
The mjbots quad series stands out because it connects open hardware, custom motor controllers, simulation, and real dynamic robot design. It shows how a determined engineer can move from dissatisfaction with existing components to creating a full actuator ecosystem.
Stanford Doggo
Stanford Doggo proved that a relatively low-cost student-built quadruped could achieve serious agility. Its open-source design and accessible bill of materials helped inspire a wider builder community.
Solo 8
Solo 8 highlights the importance of shared research platforms. Its torque-controlled modular architecture allows labs to test dynamic locomotion strategies without needing a custom robot from scratch.
MIT Mini Cheetah
MIT Mini Cheetah remains a benchmark for agile quadruped research. Its backflip demonstrated high power density, robust actuation, and experimental freedom. It also inspired many open projects by showing what small electric quadrupeds could become.
ROS and Gazebo Quadruped Ecosystems
Open simulation and robot software packages let developers test control concepts, visualize models, and work through low-level joint behavior before moving to hardware. This software layer is one of the reasons the broader quadruped community has grown so quickly.
Challenges Holding Open Source Quadrupeds Back
Open source quadrupeds are exciting, but they still face serious challenges. Cost has fallen, yet high-quality motors, batteries, controllers, sensors, and compute modules are not cheap. Assembly requires patience and tools. Documentation can lag behind fast-moving hardware revisions. A design that works for its original creator may still be difficult for a newcomer to reproduce.
Control software is another hurdle. Dynamic locomotion is mathematically demanding. Builders must think about kinematics, dynamics, state estimation, foot trajectories, body orientation, motor current, torque limits, and contact timing. Even when code is available, understanding it deeply takes time.
There is also the durability problem. Dynamic motion is violent. Jumps and trots create repeated impacts. Screws loosen. Plastic parts fatigue. Motors heat up. Wires flex. A robot that looks elegant in a one-minute video may require hours of maintenance afterward. That is not failure; that is robotics being honest.
Experiences and Practical Lessons From Working Around Dynamic Open Source Quadrupeds
One of the most memorable experiences related to open source quadrupeds is realizing how alive they feel when the control loop finally works. A robot sitting on a bench is a collection of parts: carbon fiber, printed plastic, wires, motors, boards, bearings, and bolts. But when the legs begin responding smoothly to commands, the machine suddenly has presence. It crouches. It pushes. It corrects itself. It looks as if it has intentions, even though everyone in the room knows those intentions are mostly matrices and motor currents.
The first practical lesson is that documentation is gold. Open source robotics does not succeed only because files are available. It succeeds when those files are understandable. A clean wiring diagram can save hours. A clear assembly photo can prevent a backward-mounted bracket. A note about firmware versions can rescue a weekend. Builders often underestimate how much time they will spend not building the robot, but trying to understand why the robot does not match the instructions. Good documentation is the quiet hero of the open source quadruped world.
The second lesson is that small mechanical details become big software problems. A slightly loose belt, a flexing mount, or a foot pad with uneven wear can look like a control bug. The software developer may spend hours tuning gains, only to discover that a screw has been impersonating a research challenge. Dynamic motion exposes every weakness because the robot repeatedly loads and unloads its structure. If the frame twists, the controller feels it. If the motor heats, the gait changes. If the floor is slippery, the robot suddenly becomes a physics demonstration with legs.
The third lesson is that simulation is both wonderful and humbling. In simulation, the robot may trot like a champion. On the floor, it may take three steps and perform what can only be described as interpretive collapse. This does not mean simulation is useless. It means simulation is a map, not the territory. The best workflow is to use simulation to eliminate obvious mistakes, then move carefully to hardware with low speeds, padding, logging, and emergency stops. Dynamic robot testing should feel less like “let’s see what happens” and more like “let’s make sure what happens is survivable.”
The fourth lesson is that open source communities are part of the machine. A quadruped robot is not just hardware and software. It is forum posts, GitHub issues, videos, shared calibration tips, design forks, and builders who explain what failed so the next person can fail in a more advanced way. That is progress. In commercial robotics, failure is often hidden behind product polish. In open source robotics, failure can become public knowledge, and public knowledge becomes better robots.
The fifth lesson is that dynamic quadrupeds teach humility. They combine disciplines that rarely forgive guesswork. Mechanical design asks whether the structure can survive. Electrical design asks whether the power system can deliver current safely. Embedded software asks whether commands arrive on time. Control theory asks whether the motion makes sense. Reality asks whether anyone remembered to charge the battery. When the robot finally trots across the floor, the achievement feels earned because so many systems had to agree at once.
For educators, these robots are especially powerful. Students do not just learn formulas; they see consequences. Too much gain causes oscillation. Poor cable routing restricts a leg. Bad calibration creates strange posture. A weak battery changes performance. These lessons stick because they are physical. The robot becomes a professor with rubber feet and no patience for vague assumptions.
For hobbyists, the experience is equally addictive. An open source quadruped invites tinkering. You can redesign a foot, test a new gait, improve the enclosure, add a camera, integrate an IMU, or build a better test stand. Each improvement opens another question. That loop of curiosity is exactly why the field keeps growing. The robot is never really finished. It is simply more capable than it was last week.
Conclusion: Open Source Robot Dogs Are More Than a Cool Trick
The amazing thing about an open source quadruped capable of dynamic motion is not only that it can trot, jump, recover, or occasionally attempt a move that makes everyone in the lab hold their breath. The amazing thing is that these machines make advanced robotics more understandable and more accessible. Projects like mjbots Quad, Stanford Doggo, Solo 8, and the broader Open Dynamic Robot Initiative show that legged robotics can be shared, studied, modified, and improved by a much larger community.
Dynamic quadrupeds still require skill, caution, and persistence. They are not weekend toys for total beginners, and they are very good at turning tiny mistakes into dramatic evidence. But they represent a major shift in robotics culture. Instead of admiring robot dogs from a distance, students, researchers, and makers can now build, inspect, simulate, and improve them. That is how a field growsfrom locked boxes to open designs, from isolated demos to shared platforms, and from “look what they made” to “look what we can build next.”
In the end, the open source quadruped movement is about more than mechanical dogs. It is about giving more people the tools to explore physical intelligence. And if those tools occasionally bounce across the floor like a caffeinated metal puppy, well, that is just part of the charm.