Table of Contents >> Show >> Hide
- Why Water Quality Is Harder Than It Looks
- Meet the Two-Robot Team
- Why Two Robots Are Better Than One
- What These Robots Are Actually Looking For
- Real-World Use Cases That Make This More Than a Cool Demo
- The Big Advantage: Better Data, Not Just More Data
- The Catch: Robots Are Not Magic Canoes
- Why This Matters for the Future of Water Monitoring
- Field Notes and Human Experience: What This Kind of Work Actually Feels Like
Note: This article is based on real information and current U.S. research and agency guidance, but source links are intentionally omitted to keep the page clean for web publishing.
Water quality monitoring used to have a certain old-school charm: a small boat, a few sample bottles, a field notebook, and one scientist trying not to drop a probe overboard while leaning at a regrettable angle. Charming? Maybe. Efficient? Not exactly. If you want to understand what is really happening in a lake, reservoir, river, estuary, or stormwater pond, a single sample from a single spot is about as revealing as judging an entire movie from one frame. Water changes by depth, by time of day, by weather, by runoff, by algae growth, and by whatever humans have recently done nearby. In other words, water is busy.
That is exactly why the idea of analyzing water quality with a pair of robots is so compelling. Instead of sending one instrument to one place and hoping for the best, researchers can deploy two coordinated machines: one robot at the surface and another below it. The surface robot handles navigation, positioning, communications, and mission control. The underwater robot does the intimate detective work, moving through the water column and collecting readings where the story is actually unfolding. Together, they act less like gadgets and more like a field team that never complains about sunscreen, muddy boots, or 6:00 a.m. launch times.
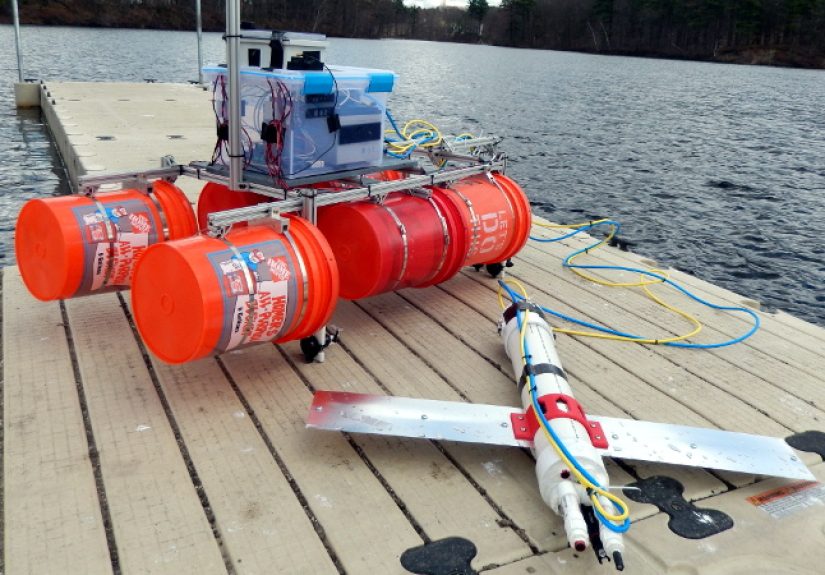
A particularly memorable example came from Northeastern University’s Project Albatross, a student-built system that combined an unmanned surface vehicle with a tethered underwater vehicle for real-time, multi-depth water quality monitoring. The design was smart, practical, and refreshingly unpretentious: open-source software, off-the-shelf parts, and a mission focused on getting better data without needing an oceanographic budget that requires a dramatic pause before announcing it. The concept matters because it points toward a future where robotic water monitoring is not only more powerful, but more accessible.
Why Water Quality Is Harder Than It Looks
From shore, a body of water can look calm, even healthy. It might sparkle. It might host ducks. It might trick everyone into thinking everything is fine. But water quality is rarely visible in such a simple way. Important changes happen below the surface and often at different depths. Temperature can shift from a warm upper layer to a colder lower one. Dissolved oxygen may be healthy near the top but depleted farther down. pH can change. Turbidity can spike after storms. Conductivity may suggest dissolved salts or other substances are moving through the system. Nutrients such as nitrogen and phosphorus can feed harmful algal blooms, while bacteria, metals, and organic contaminants can create public health and ecological risks.
That complexity is why agencies and researchers monitor a mix of physical, chemical, and biological indicators. Common field parameters include temperature, pH, dissolved oxygen, turbidity, and conductivity. Depending on the site, teams may also track chlorophyll, phycocyanin, nitrate, E. coli, metals, suspended solids, and other indicators that help explain whether a water body is simply a little messy or headed toward an ecological soap opera.
The problem with traditional sampling is not that it is useless. It is that it can be too sparse. A crew may collect a vertical profile at one location, then move to another, then another, and hope the water does not change faster than the boat can. That is a tough bargain. In dynamic systems, important features can be missed between sampling points. A bloom hotspot, a low-oxygen pocket, or a plume from runoff does not wait politely for your schedule.
Meet the Two-Robot Team
The Surface Robot: Brains, Boat, and Messenger
The surface robot is usually the navigator and communications hub. It follows a planned route, holds position, logs GPS data, and relays information back to shore. In many systems, it also provides power, telemetry, and a stable platform for antennas, processors, and control electronics. Think of it as the organized friend in the group project: not always the one doing the glamorous work, but the one preventing total chaos.
In the Project Albatross model, the surface vehicle received mission plans from a ground control station, towed the underwater unit, stored measurements locally, and transmitted data to shore in real time. That sounds technical because it is, but the practical value is simple: scientists do not have to wait until the mission ends to discover whether something interesting is happening. They can see trends while the robots are still in the water.
The Underwater Robot: The One That Gets Dirty
The underwater robot handles the hard part: collecting measurements where vertical variation actually matters. In the Albatross setup, the subsurface vehicle measured conductivity, temperature, depth, pH, turbidity, and dissolved oxygen. That combination matters because together those readings can reveal stratification, mixing, organic activity, sediment disturbance, and general ecosystem stress.
Other robotic platforms go even further. USGS has used autonomous underwater vehicles in North Carolina’s Cape Fear River Basin to collect high-frequency measurements that included temperature, specific conductivity, dissolved oxygen, turbidity, chlorophyll fluorescence, and phycocyanin fluorescence. That is not just a neat engineering flex. It is how scientists begin to see a water body as a moving map instead of a few disconnected dots.
Why Two Robots Are Better Than One
A paired system solves several problems at once. First, it captures both horizontal and vertical variation. A surface route tells you where conditions change across space, while the submerged robot tells you how those conditions change with depth. One robot alone may give you a flat picture of a layered problem.
Second, a two-robot setup improves speed and coverage. Manual crews can absolutely gather excellent data, but they are constrained by time, labor, safety, and cost. Robots can repeat routes, hold patterns, and gather denser datasets without needing lunch, coffee, or a pep talk after the weather turns weird.
Third, it can improve safety. This matters more than people sometimes admit. At hydropower sites, tailraces, working waterfronts, contaminated zones, or rough conditions, sending people out for repeated manual measurements is not always ideal. DOE’s Pacific Northwest National Laboratory has emphasized that autonomous and remotely operated water quality systems can reduce worker risk, expand spatial coverage, and provide real-time communication for operators making environmental decisions.
Fourth, it helps with decision-making while conditions are still changing. Real-time transmission means researchers, utilities, dam operators, shellfish managers, or public health officials can respond faster. That shift from “collect now, interpret later” to “monitor now, act sooner” is a big deal.
What These Robots Are Actually Looking For
Dissolved Oxygen
Dissolved oxygen is one of the classic heavy hitters in water quality. Fish and other aquatic life rely on it. When oxygen drops, stress rises, and in bad cases aquatic organisms die off. Low oxygen can be linked to organic pollution, algal decay, warm temperatures, and poor mixing. Robots that profile dissolved oxygen by depth are especially valuable because oxygen problems often hide below the cheerful-looking surface.
Temperature
Temperature influences chemistry, biology, and oxygen availability. Warm water holds less oxygen, and layered temperature structures can prevent mixing. That means a water body can look uniform from above while behaving like separate stacked neighborhoods below.
pH and Conductivity
pH helps reveal the chemical character of the water and can shift with biological activity, runoff, acidification, or industrial impacts. Conductivity is a proxy for dissolved ions and can point toward salinity, road salt influence, wastewater effects, or other chemical changes. These are quiet but useful clues, like the supporting characters in a detective story who turn out to know everything.
Turbidity, Chlorophyll, and Phycocyanin
Turbidity tells you how cloudy the water is. A spike can come from sediment, storm runoff, or biological activity. Chlorophyll and phycocyanin fluorescence can help identify algal patterns and cyanobacterial concerns. When those measures are collected across space and depth, researchers can detect blooms more intelligently instead of chasing rumors from a suspiciously green shoreline.
Real-World Use Cases That Make This More Than a Cool Demo
Two-robot monitoring is not just a nice engineering project for people who enjoy cables, coding, and the smell of waterproof sealant. It has serious use cases.
Lakes and reservoirs: Robotic pairs can map stratification, oxygen depletion, algal hotspots, and sediment disturbance. That is useful for drinking water management, fisheries, and recreation advisories.
Urban ponds and park lakes: Columbia University’s AQUAS project is developing a self-driving boat to detect and mitigate harmful algal blooms in New York City park waters. That is a reminder that “water quality robotics” is not just for remote science expeditions. Sometimes the test site is basically next to a jogger with earbuds.
Shellfish and aquaculture: NOAA’s Environmental Sample Processor functions like a water quality robot with a lab coat. It can detect microorganisms in water using molecular probes, helping managers identify harmful algae, pathogens, and contamination risks in near real time before shellfish and fish are affected.
Hydropower and dam operations: Autonomous systems can measure water quality throughout a three-dimensional volume rather than at one fixed point. That helps operators evaluate dissolved oxygen and related parameters more effectively and adjust operations when needed.
Mine-impacted and sediment-heavy waters: Purdue’s robotic water monitoring work highlights how low-cost systems can support water and sediment sampling in challenging environments. In places where contamination may vary from one cove, outfall, or depth band to another, mobility matters.
Coastal and ocean science: The same logic scales up. NOAA’s Biogeochemical-Argo floats use autonomous robotic platforms to track oxygen, pH, nitrate, chlorophyll, and particles over large areas. NASA remote sensing can estimate surface conditions such as chlorophyll-a, turbidity, and suspended solids, while in situ robotic sensors help verify what satellites see. In short, robots in the water and eyes in the sky are becoming science’s favorite power couple.
The Big Advantage: Better Data, Not Just More Data
There is a difference between collecting a lot of numbers and collecting the right numbers in the right places at the right times. A pair of robots improves water analysis because it is built around context. The surface vehicle knows where the system is. The underwater vehicle knows what the water is doing at depth. The combined dataset can reveal gradients, hotspots, boundaries, and anomalies that static monitoring stations or occasional manual sampling may miss.
That matters for trend detection and early warning. Harmful algal blooms often respond to nutrients, warmth, slow-moving water, and changing local conditions. Public health risks increase when detection happens late. Robotic systems help narrow that gap. They do not eliminate laboratory science or replace human judgment, but they make both more effective.
They also make research more agile. FIU researchers have shown how smarter marine robotics can adapt routes while tracking water quality hotspots such as temperature, dissolved oxygen, and turbidity. Instead of blindly following a preset path, future systems can decide where the next useful reading is likely to be. That is when robotic monitoring stops feeling like automation and starts feeling like strategy.
The Catch: Robots Are Not Magic Canoes
Of course, robotic monitoring is not effortless. Sensors drift. Biofouling happens. Batteries run down. Communication drops out. Waterproofing always sounds easier in a lab than on a windy shoreline with wet hands and a deadline. USGS guidance on continuous water-quality monitoring makes clear that quality control is essential, especially when conditions are variable and instruments are exposed for long periods. EPA guidance for participatory science makes the same point in a friendlier way: if you want the data to matter, quality assurance has to matter too.
That is especially important if low-cost or community-built systems are part of the future. Affordable robotics can open doors for local groups, schools, watershed organizations, and citizen scientists, but only if calibration, documentation, and sampling methods are handled seriously. Good science is not ruined by low-cost hardware; it is ruined by sloppy process. Big difference.
Why This Matters for the Future of Water Monitoring
The most exciting thing about analyzing water quality with a pair of robots is not the hardware itself. It is the shift in mindset. Water monitoring is moving away from isolated samples and toward continuous, distributed, multi-scale observation. That means surface robots, underwater vehicles, fixed stations, laboratory analysis, participatory science, and satellites all have roles to play.
In that future, the pair-of-robots idea is especially powerful because it is practical. It bridges the gap between high-end oceanographic autonomy and everyday environmental monitoring. It can be scaled up for agencies and utilities or scaled down for local projects and universities. It can support bloom detection, drinking water protection, habitat assessment, compliance work, and exploratory research. Best of all, it turns a messy environmental challenge into something that can be mapped, repeated, compared, and acted on.
That is the real promise here. Not robots for the sake of robots. Not shiny tech floating around like it is auditioning for a science fiction reboot. Just smarter tools for understanding water before a problem becomes a crisis.
Field Notes and Human Experience: What This Kind of Work Actually Feels Like
Anyone who has spent time around robotic water monitoring knows the experience is equal parts science, patience, and minor chaos. The mission always begins with optimism. The batteries are charged. The cables are coiled. The laptop is open. The weather forecast looks acceptable in the suspicious way weather forecasts often do. At the shoreline, the paired robots look oddly humble for something doing advanced environmental analysis. One floats calmly at the surface. The other waits to slip below. Neither looks like it is about to help decode a complex living system. Then the mission starts, and suddenly the whole scene changes.
The first feeling is usually relief. When the surface robot locks onto its route and the telemetry begins streaming back, it feels like the plan might actually work. That is not a small emotional milestone in field robotics. Water is unforgiving. It splashes, corrodes, hides obstacles, and treats electronics like personal enemies. So when the underwater unit begins reporting temperature, dissolved oxygen, pH, turbidity, or conductivity in real time, there is a quiet thrill in watching a body of water become a moving dataset instead of a flat blue mystery.
Then comes curiosity. As the robot pair moves along, the numbers stop being abstract. A slight oxygen drop at depth feels important. A sudden turbidity spike makes everyone stare at the screen and then at the water, as if the pond might confess. A pH shift becomes a clue. A chlorophyll signal looks like the beginning of a story. This is one of the most satisfying parts of robotic sampling: it changes fieldwork from isolated guessing to active interpretation. You are not just collecting samples for later. You are watching patterns emerge while the mission is still unfolding.
There is also a very human kind of tension in every deployment. Will the tether behave? Will the GPS drift? Will the robot snag vegetation? Will the wireless link drop at the exact moment something interesting happens, because of course it would? These are not glamorous concerns, but they shape the experience. Robotic water monitoring is full of tiny practical victories: a clean launch, a stable profile, a complete data log, a successful recovery, a sensor that stays calibrated, and a mission that ends with more insight than troubleshooting.
What surprises many people is how collaborative the experience feels, even when machines are doing much of the movement. Someone is watching the live plots. Someone is checking depth behavior. Someone is scanning the shoreline for obstacles. Someone is already thinking about how the map will look once the data are cleaned. The robots reduce labor in one sense, but they also sharpen the human role. People become interpreters, planners, and decision-makers rather than full-time manual samplers.
And when the mission works well, the ending is deeply satisfying. You pull the robots out, wet and a little scuffed, and realize the lake or river is no longer just a scenic backdrop. It has structure now. It has hotspots, layers, anomalies, and patterns. It has a profile. That feeling is why this approach matters. A pair of robots does not just collect better numbers. It changes the human experience of water science from slow sampling and delayed answers to immediate discovery. For researchers, students, and community monitoring groups alike, that shift can be addictive in the best possible way.